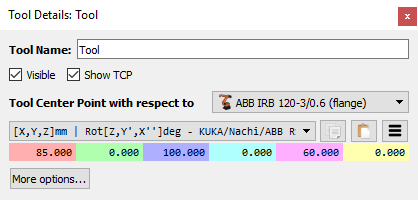
Robot Tool (TCP)
Double click a Robot Tool 
Note: The TCP pose can also be modified from the Robot Panel.
Selecting More options… allows applying a scale factor to the geometry of the tool or move the geometry with respect to the robot flange. Altering these values has no impact on robot programs. The geometry is used for display purposes and collision checking. (keeping the TCP intact).
Tip: It is possible to provide the position of the TCP with respect to another TCP by selecting that reference TCP instead of the robot flange. For example, a cutter tool can be defined at a specific distance along the Z axis with respect to another TCP that represents the spindle. This example provides more details.
Video: The following video provides a general overview of robot tools (TCP): https://www.youtube.com/watch?v=FltOFBCzx-w&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=11