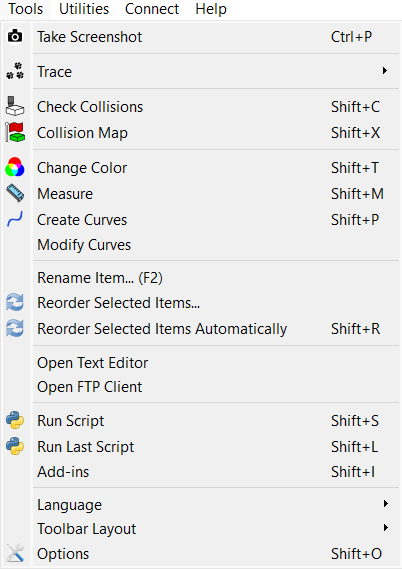
You can access generic tools in the Tools menu, such as taking 3D measurements, activate collision checking or activating the robot trace.
Activating the Trace will show the trace of all robots as they move.
Check Collisions will activate or deactivate collision checking. When collision checking is activated, objects that are in a collision state will be displayed in red.The Collision Map allows specifying what object interactions are being checked.
Note: More information available regarding collision detection in the Collisions section.
Change Color Tool will display a small window that allows changing the color of robots and objects. It is also possible to flip the normal vectors of surfaces.
Measure will display a window that allows measuring points in 3D with respect to a local reference frame or the station reference frame (absolute measurements).
It is possible to specify the language of the RoboDK application by selecting Tools➔Language and select the preferred language. RoboDK will be displayed in the selected language immediately.
Toolbar Layout allows setting up the default toolbar. Alternatively, it is possible to specify a toolbar for a more basic or more advanced usage.
Select Options to open the main options menu. More information available in the Options Menu section.