Python Online Programming
Python programs can be directly executed on the robot using the same Python code used to simulate the robot (as shown in the Python Simulation section). Online programming allows running a generic program on a specific robot controller using Robot Drivers:
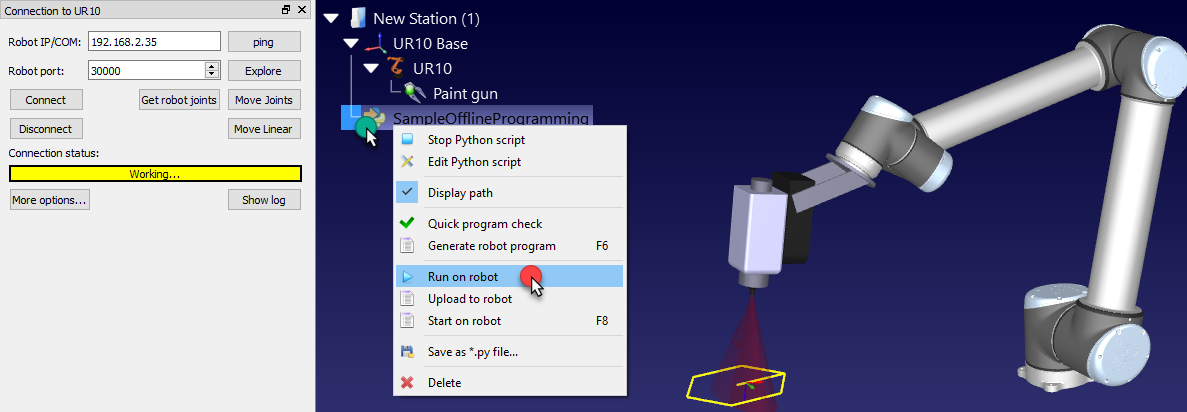
1.Right click a 
2.Select Run on robot
The program will run on the robot as it the Python program is executed.
Important: A connection between the PC and the robot is required by using Robot Drivers (right click a robot, then, select Connect to robot…). More information in the Robot Drivers section.
Note: The Run on robot option will automatically set the RunMode of the RDK/Robolink connection to RUNMODE_RUN_ROBOT. In other words, it is possible to run the robot movement commands outside the RoboDK’s GUI. For example:
RDK = Robolink()
RDK.setRunMode(RUNMODE_RUN_ROBOT)
Tip: The macro SampleOnlineProgramming.py from the C:/RoboDK/Library/Macros/ folder provides a full example to test it with the same hexagonal path used in the Python simulation section.
Note: More information about using robot drivers through the API in the Robot Drivers section.