Post processors vs Drivers
Post processors and robot drivers use different methods to move robots. While a post processor allows you to generate programs offline, a driver allows you to have real time communication with your robot.
A post processor is used for offline programming and is responsible for converting the RoboDK robot program into the native programming language of the associated robot controller. For instance, the ABB post processor generates .mod files for IRC5 controllers. The post processor also includes program uploading to the robot controller, often by FTP. The following functionalities of a program are handled by the post processor:
1.Generate Robot Program
2.Generate Robot Program as…
3.Send Program to Robot
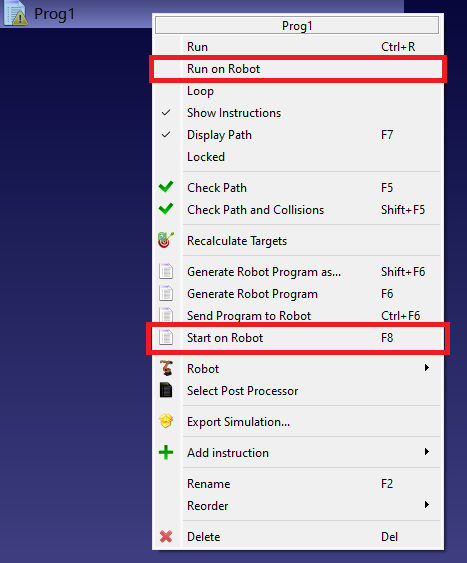
4.Start on Robot (in combination with the driver)
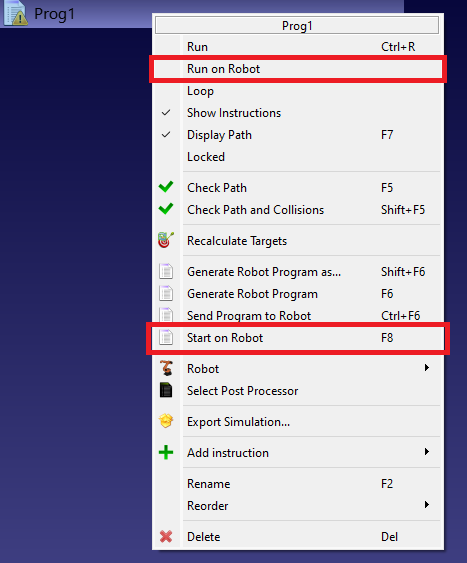
A robot driver enables remote control of your robot from your computer using RoboDK. This allows you to execute program instructions from RoboDK on the robot controller in real time. This includes the ability to call remote programs on the controller. For example, the ABB driver sends motion commands through socket communication. The following functionalities are handled by the driver:
1.Activate the option Run on Robot, then double click to run the program on the robot using the driver.
2.Start on Robot (in combination with the post processor)