Extruder Synchronization
By default, RoboDK translates Cura’s E directive as a program call to a program called Extruder, passing the E value as a parameter.
This can be modified in Tools → Options → Program Events.
Note: The ABB RAPID post processor includes recommended modifications to synchronize the robot motion with the CEAD extruder feed.
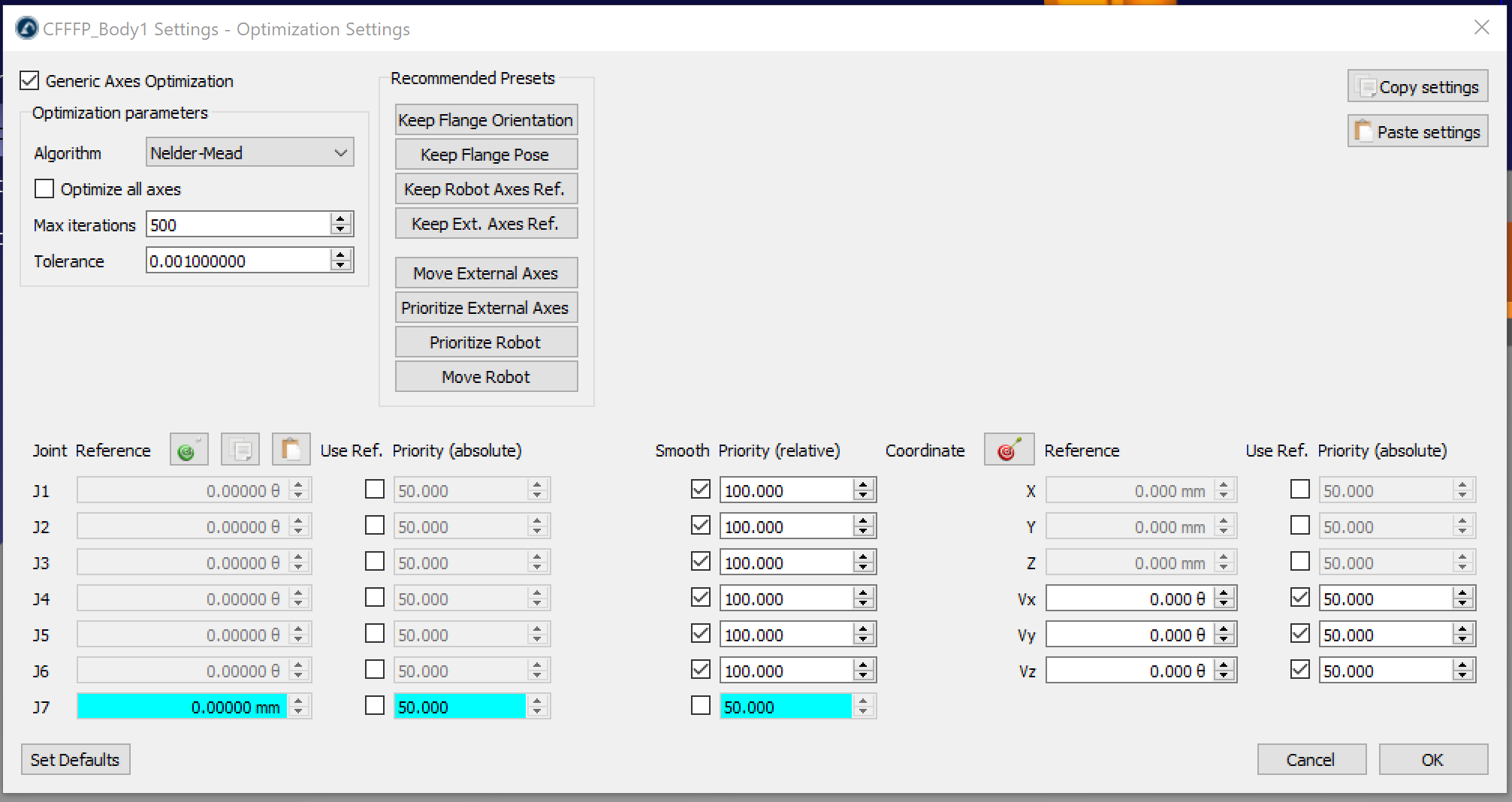
Note: You can optimize the priority of movement to minimize the movement of the rail in Robot Machining Project → Axes Optimization → More Options.