Generate and Import G-code
After tilting the model, slice it in Cura and save the program as a .gcode file.
In RoboDK, select Utilities → Convert NC Program and choose the Cura file.
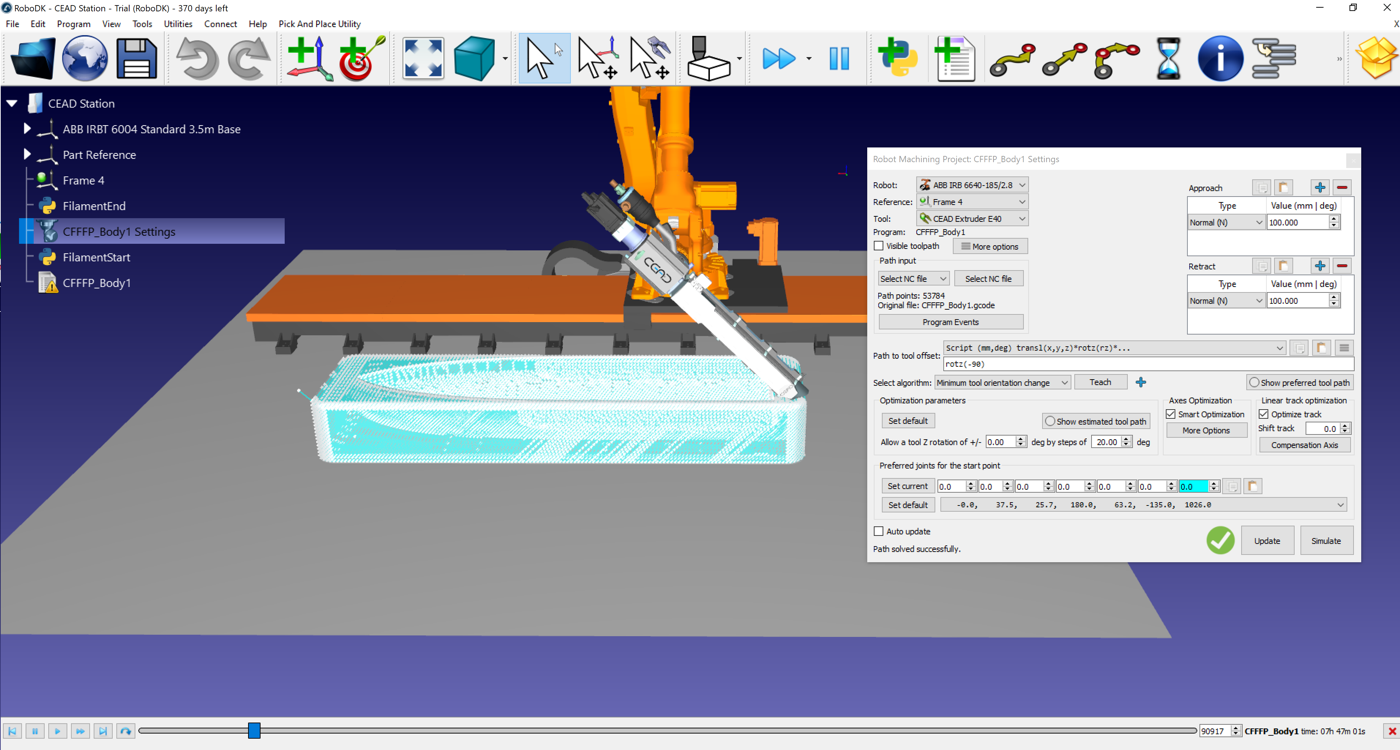
In the NC import dialog:
1.Select the ABB IRB 6640 robot.
2.Add the ABB IRBT 6004 rail as an external axis.
3.Select the CEAD extruder as the tool.
4.Define the reference frame (boat hull platform).
Note: Cura’s extrusion directive E is automatically converted to Extruder(E) program calls in RoboDK, or mapped to an analog output signal.