Set Speed
Select Program➔
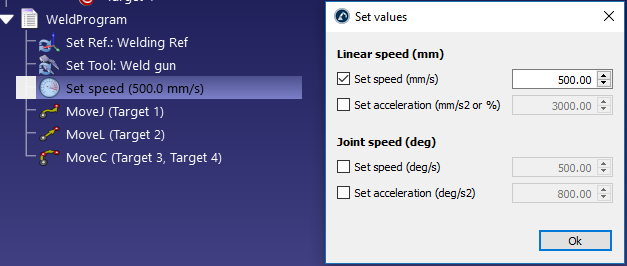
Activate the corresponding cases to impose a specific speed and/or acceleration in the program. The robot speed is applied from the moment this instruction is executed.
The robot speed can also be changed in the robot parameters menu: Double click the robot, then, select parameters.
Note: Not all robot controllers support setting accelerations accurately.
Important: Setting the right speed is important to accurately calculate the program time (cycle time). More information available in the cycle time section.